
It was two years ago that a small robotic robotic beam became a robot robot in the world. One of his offspring is now supposed to accelerate this record – and that is used less Energy than its predecessor, to introduce.
The original 22.8 mm long robot was designed by Assoc. Jie Yin and his colleagues at the State University of North Carolina.
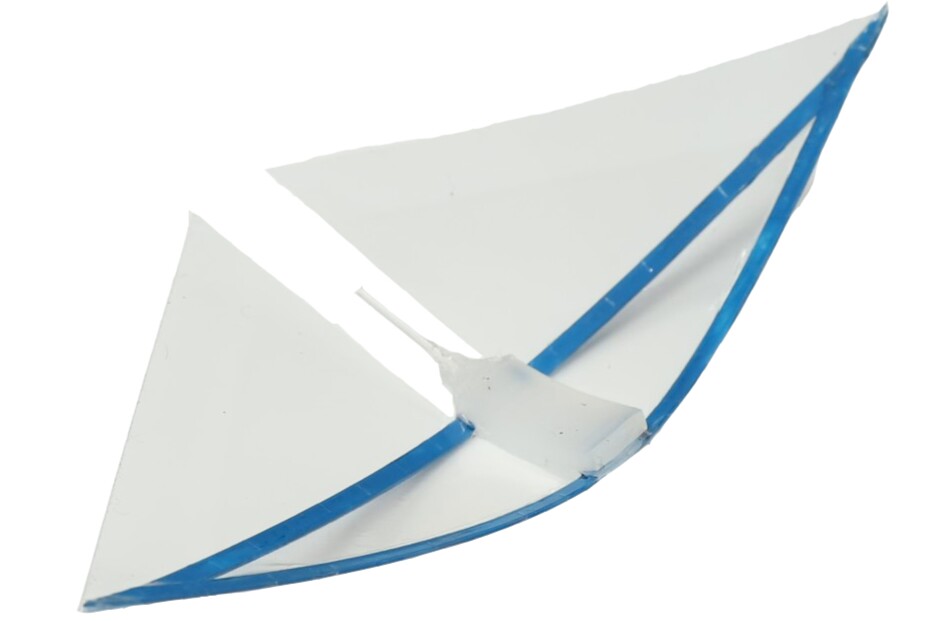
This represented two flexible wings similar to the Manta-Ray polyester, which was actually the left and right end of the only curved bistable structure. Bistability concerns the capacity of the tension structure to remain on the eithu of two positions without required any energy – a hair clip is a good examination of a bistable structure.
State University in North Carolina
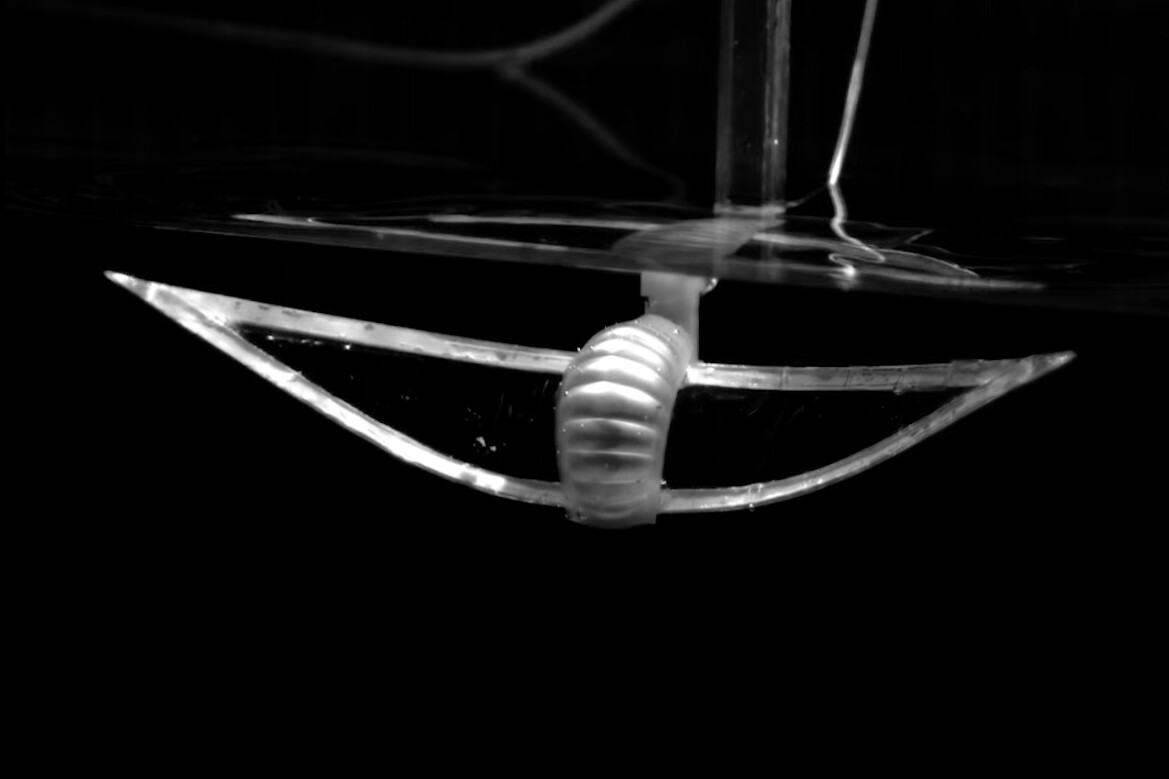
The center of the robot’s bistrable wing was inserted between the upper and lower soft silicone pneumatic drive.
When he was pumped into the upper controller, he emerged up and pulled out at the center of the wing structure, causing it to “surprise” into a position that pulled the two wings down. When the upper controller was defined and shoe One was attacked, the structure set out in the opposite direction and brought the wings back. The mechanism is demonstrated in the following video.
A soft robotic swimmer similar to butterflies that are fast and efficient
In this way by activating both drivers back and forth (via external air pump), the flap could be fast enough for the average swimming speed of 3.74 body lengths per second. According to scientists, it was about four times faster than before with soft body swimming robots.
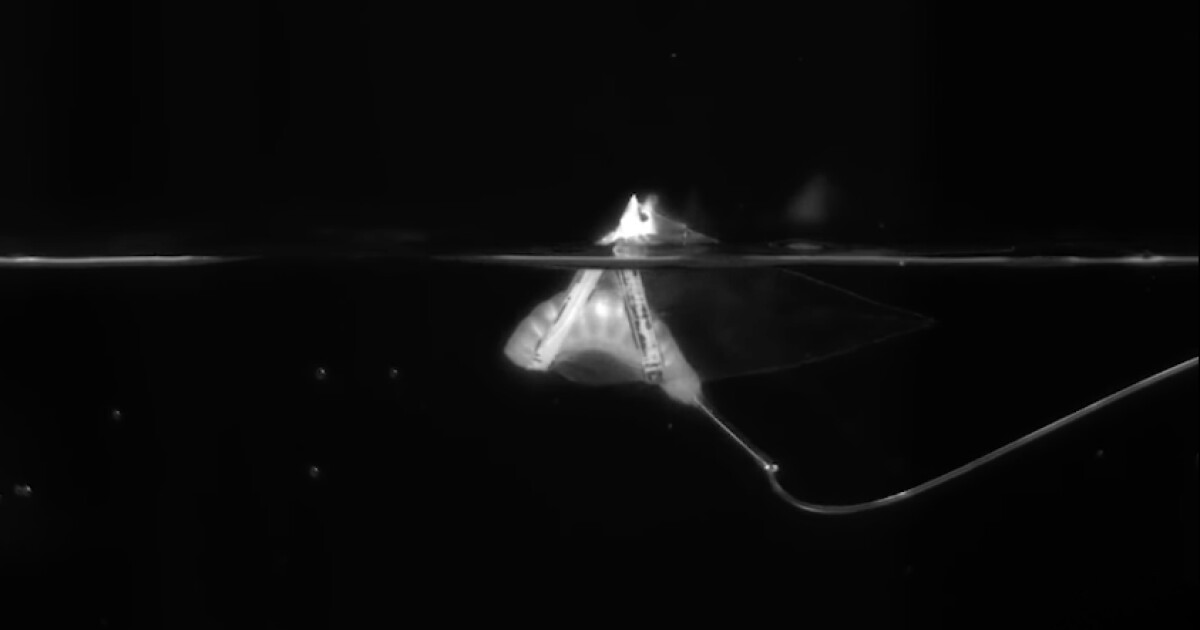
In a 68 mm long new Robo-Manta, Yin and his team left with a bisthable design along with the lower driver. The flexible structure of the wing is now free, which means that it will always return to only one position – curved in the middle of the wing – when no energy is applied.
Haitao Qing, NC State University
After inflating, one upper pneumatic drive of the curls down and down at the center of the wing structure causes the wings to reach down. However, as soon as the driver is left to blow, the elastic restoration of the structure force causes to return to the starting position, with the wings in the process drawing the wings up.
So while the original robot had to take time and energy to bloom alternately/deflate two drivers on the wing and down cycle, the new robot must only activate. This improvement gives the robot an average speed of swimming incredible 6.8 body lengths per second, consuming 1.6 times less energy than the original.
Haitao Qing, NC State University
In addition, the new design allows shoes to move vertically in the water by simply changing the speed of swimming.
“When the robot fin is calm, the air chamber is empty and reduces the robot’s buoy. And when the robot waving a fine slowly, the fine is at all, ”says PhD Haitao Qing, the first author study study study study. “In other words, the quickly the robot puts its fin, the more time the air chamber is full, so it is more hovering.”
Scientists are now working on a lateral robot control method with regard to future applications such as ocean survey and water animals. In action you can see in the video below.
The study post was recently published in the magazine Progress.
Fast and maneuverable soft swimming robots inspired by Manta Ray
Source: State University in North Carolina